11. Februar 2012
Template Tracking using Hyperplane Approximation
 Tracking an object over a sequence of 2D images is a challenging task. One approach uses a linear mapping between observed intensity differences and target motion; this is presented in the paper Hyperplane Approximation for Template Matching by F, Jurie and M. Dhome. Here are some results from an implementation in Matlab by a fellow student and me.
Tracking an object over a sequence of 2D images is a challenging task. One approach uses a linear mapping between observed intensity differences and target motion; this is presented in the paper Hyperplane Approximation for Template Matching by F, Jurie and M. Dhome. Here are some results from an implementation in Matlab by a fellow student and me.
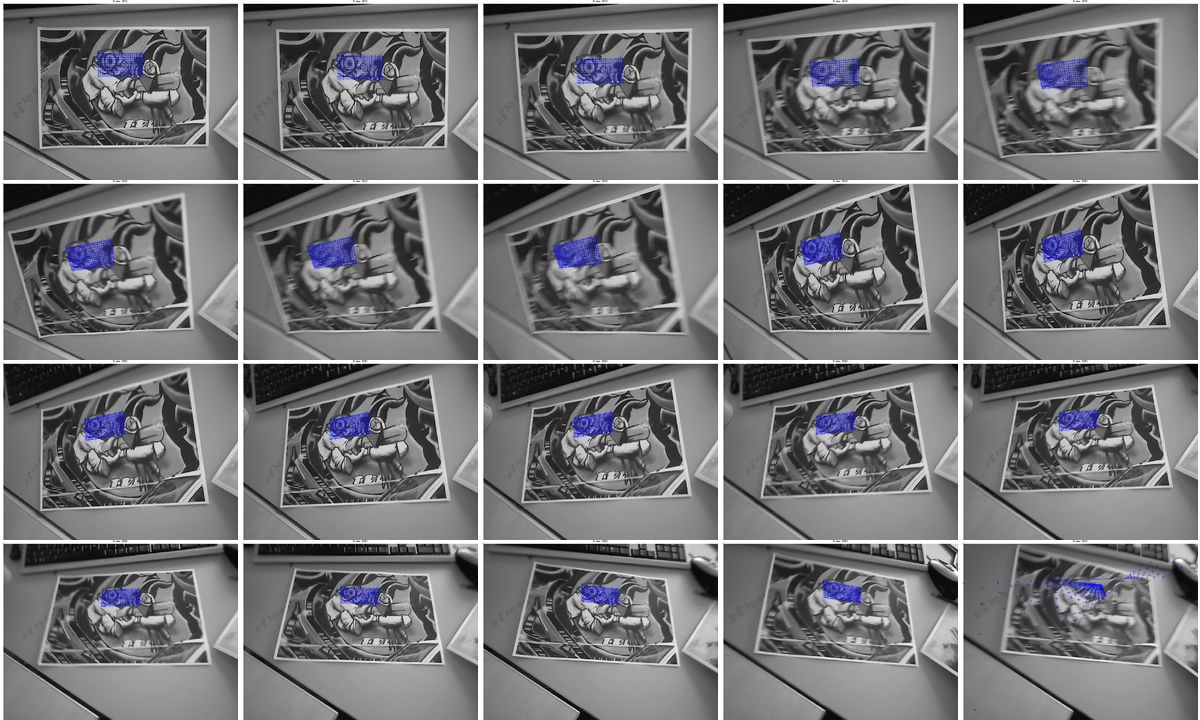
Here, the problem is to track a certain template over a sequence of grayscale images. The results on the first 20 images in a sequence of 44 images are shown in the following image. The graffiti region is tracked well over the first 19 images but then the tracker loses its target. Anyway, the implementation is at most rough-and-ready and it is sufficient for a proof-of-concept.
{kind=link}
(Thanks for our supervisor in TUM Tracking&Detection course for his suggestions).
The tracker operates in two separate stages. First, the tracker learns how intensity differences are related to target motion. This is achieved by warping the template randomly and observing how the intensity on a grid changes. Second, in the tracking stage, the target location is updated iteratively according to the observed intensity differences. A helpful summary on this approach can be found in Monocular Model-Based 3D Tracking of Rigid Objects: A Survey by V. Lepetit and P. Fua.